Exploring sub-pixel corner detection methods on synthetic checkerboard images — comparing the cornerSubPix gradient approach with saddle-point fitting, and measuring their accuracy under noise.
Starting from a pinhole camera model, we introduce real lens distortion through the Brown-Conrady model, and contrast the standard rectilinear f-tan(θ) projection with the equiangular f-θ lens design used in machine vision.
Using homography, CSS transforms, and a phone camera to project live video onto a cyberpunk storefront — all running in the browser.
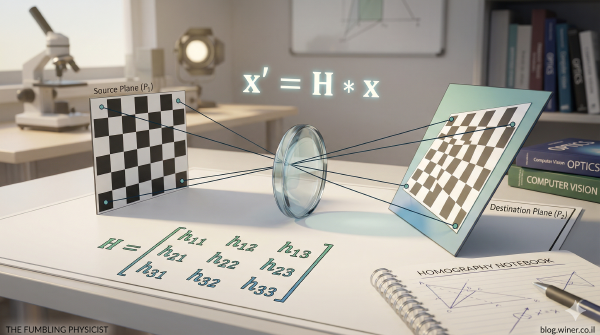
A visual and mathematical introduction to homography — how to map any flat surface onto any other using projective transformations.